Systèmes de coordonnées utilisés en topographie et géodésie. Coordonnées gaussiennes Qu'est-ce que x en coordonnées
Système de coordonnées rectangulaires- un système de coordonnées rectilignes à axes perpendiculaires entre eux dans un plan ou dans l'espace. Le système de coordonnées le plus simple et donc le plus couramment utilisé. Il est très facile et direct de généraliser à des espaces de n’importe quelle dimension, ce qui contribue également à sa large application.
Termes connexes: cartésien généralement appelé système de coordonnées rectangulaires avec des échelles égales le long des axes (ainsi nommé d'après René Descartes), et système de coordonnées cartésiennes général appelé système de coordonnées affines (non rectangulaire).
YouTube encyclopédique
-
1 / 5
Un système de coordonnées rectangulaires sur un plan est formé de deux axes de coordonnées mutuellement perpendiculaires et O (style d'affichage O), que l'on appelle l'origine des coordonnées, la direction positive est choisie sur chaque axe.
Position des points UNE (style d'affichage A) sur le plan est déterminé par deux coordonnées x (style d'affichage x) Et y (style d'affichage y). Coordonner x (style d'affichage x)égale à la longueur du segment OB, coordonner y (style d'affichage y)- longueur du segment O C (\ displaystyle OC) OB Et O C (\ displaystyle OC) sont déterminés par des lignes tracées à partir du point UNE (style d'affichage A) parallèle aux axes Oui ′ Oui (\ displaystyle Y "Y) Et X ′ X (\style d'affichage X"X) respectivement.
A cette coordonnée x (style d'affichage x) B (style d'affichage B) se trouve sur le rayon (et non sur le rayon O X (\style d'affichage OX), comme sur la figure). Coordonner y (style d'affichage y) un signe moins est attribué si le point C (style d'affichage C) repose sur la poutre. Ainsi, O X ′ (\style d'affichage OX") Et O Oui ′ (\ displaystyle OY ") sont les directions négatives des axes de coordonnées (chaque axe de coordonnées est considéré comme un axe numérique).
Axe x (style d'affichage x) est appelé l'axe des abscisses, et l'axe y (style d'affichage y)- axe des ordonnées. Coordonner x (style d'affichage x) appelé abscisse points UNE (style d'affichage A), coordonner y (style d'affichage y) - ordonnée points UNE (style d'affichage A).
UNE (x, y) (\displaystyle A(x,\;y)) A = (x, y) (\displaystyle A=(x,\;y))ou indiquer que les coordonnées appartiennent à un point précis à l'aide d'un index :
x UNE , x B (\displaystyle x_(A),x_(B))Système de coordonnées rectangulaires dans l'espace(dans ce paragraphe, nous entendons l'espace tridimensionnel, à propos d'espaces plus multidimensionnels - voir ci-dessous) est formé de trois axes de coordonnées mutuellement perpendiculaires O X (\style d'affichage OX), O Oui (\ displaystyle OY) Et OZ (\displaystyle OZ). Les axes de coordonnées se coupent au point O (style d'affichage O), que l'on appelle l'origine des coordonnées, sur chaque axe une direction positive est sélectionnée, indiquée par des flèches, et une unité de mesure pour les segments sur les axes. Les unités de mesure sont généralement (pas nécessairement) les mêmes pour tous les axes. O X (\style d'affichage OX)- axe des abscisses, O Oui (\ displaystyle OY)- axe des ordonnées, OZ (\displaystyle OZ)- axe applicateur.
Position des points UNE (style d'affichage A) dans l'espace est déterminé par trois coordonnées x (style d'affichage x), y (style d'affichage y) Et z (style d'affichage z). Coordonner x (style d'affichage x)égale à la longueur du segment OB, coordonner y (style d'affichage y)- longueur du segment O C (\ displaystyle OC), coordonner z (style d'affichage z)- longueur du segment OD (\ displaystyle OD) dans des unités de mesure sélectionnées. Segments OB, O C (\ displaystyle OC) Et OD (\ displaystyle OD) sont déterminés par des plans tirés du point UNE (style d'affichage A) parallèle aux plans Y O Z (\style d'affichage YOZ), X O Z (style d'affichage XOZ) Et X O Y (style d'affichage XOY) respectivement.
Coordonner x (style d'affichage x) appelé l'abscisse du point UNE (style d'affichage A), coordonner y (style d'affichage y)- ordonnée du point UNE (style d'affichage A), coordonner z (style d'affichage z)- point d'application UNE (style d'affichage A).
Symboliquement, cela s'écrit ainsi :
UNE (x , y , z) (\displaystyle A(x,\;y,\;z)) A = (x , y , z) (\displaystyle A=(x,\;y,\;z))ou liez un enregistrement de coordonnées à un point spécifique à l'aide d'un index :
x UNE , y UNE , z UNE (\displaystyle x_(A),\;y_(A),\;z_(A))Chaque axe est considéré comme une droite numérique, c'est-à-dire qu'il a une direction positive, et les points situés sur un rayon négatif se voient attribuer des valeurs de coordonnées négatives (la distance est prise avec un signe moins). Autrement dit, si, par exemple, le point B (style d'affichage B) ne pose pas comme sur la photo - sur la poutre O X (\style d'affichage OX), et sur sa continuation dans la direction opposée à partir du point O (style d'affichage O)(sur la partie négative de l'axe O X (\style d'affichage OX)), puis l'abscisse x (style d'affichage x) points UNE (style d'affichage A) serait négatif (moins la distance OB). De même pour les deux autres axes.
Tous les systèmes de coordonnées rectangulaires dans l'espace tridimensionnel sont divisés en deux classes - droits(termes également utilisés positif, standard) Et gauche. Habituellement, par défaut, ils essaient d'utiliser des systèmes de coordonnées droitiers et, lorsqu'ils les représentent graphiquement, ils les placent également, si possible, dans l'une des nombreuses positions ordinaires (traditionnelles). (La figure 2 montre un système de coordonnées droitier.) Il est impossible de combiner les systèmes de coordonnées droite et gauche par rotation pour que les axes correspondants (et leurs directions) coïncident. Il est possible de déterminer à quelle classe appartient un système de coordonnées particulier en utilisant la règle de droite, la règle de vis, etc. (la direction positive des axes est choisie de telle sorte que lorsque l'axe tourne O X (\style d'affichage OX) de 90° dans le sens inverse des aiguilles d'une montre, sa direction positive coïncide avec la direction positive de l'axe O Oui (\ displaystyle OY), si cette rotation est observée depuis le sens positif de l'axe OZ (\displaystyle OZ)).
Système de coordonnées rectangulaires dans un espace multidimensionnel
Le système de coordonnées rectangulaires peut être utilisé dans un espace de n’importe quelle dimension finie, de la même manière que pour un espace tridimensionnel. Le nombre d'axes de coordonnées est égal à la dimension de l'espace (dans cette section nous le désignerons n).
Pour désigner les coordonnées, ils utilisent généralement non pas des lettres différentes, mais la même lettre avec un index numérique. Il s'agit le plus souvent de :
x 1, x 2, x 3, … x n. (\displaystyle x_(1),x_(2),x_(3),\dots x_(n).)Pour désigner l’arbitraire je Les ème coordonnées de cet ensemble utilisent un index de lettre :
et souvent la désignation x je , (\ displaystyle x_ (i),) est également utilisé pour désigner l'ensemble des valeurs, ce qui implique que l'index parcourt l'ensemble des valeurs : je = 1 , 2 , 3 , … n (\displaystyle i=1,2,3,\dots n).
Dans n'importe quelle dimension de l'espace, les systèmes de coordonnées rectangulaires sont divisés en deux classes, droite et gauche (ou positive et négative). Pour les espaces multidimensionnels, l'un des systèmes de coordonnées est arbitrairement (conventionnellement) appelé droitier, et les autres sont droitiers ou gauchers, selon qu'ils ont ou non la même orientation.
Coordonnées vectorielles rectangulaires
Pour définir un rectangle coordonnées vectorielles(applicable pour représenter des vecteurs de n'importe quelle dimension) on peut partir du fait que les coordonnées d'un vecteur (segment orienté), dont le début est à l'origine des coordonnées, coïncident avec les coordonnées de sa fin.
Pour les vecteurs (segments orientés) dont l'origine ne coïncide pas avec l'origine des coordonnées, les coordonnées rectangulaires peuvent être déterminées de deux manières :
- Le vecteur peut être déplacé pour que son origine coïncide avec l'origine des coordonnées). Puis ses coordonnées sont déterminées de la manière décrite au début du paragraphe : les coordonnées d'un vecteur translaté pour que son origine coïncide avec l'origine des coordonnées sont les coordonnées de sa fin.
- Au lieu de cela, vous pouvez simplement soustraire les coordonnées de son début des coordonnées de la fin du vecteur (segment orienté).
- Pour les coordonnées rectangulaires, le concept de coordonnée vectorielle coïncide avec le concept de projection orthogonale d'un vecteur sur la direction de l'axe de coordonnées correspondant.
Toutes les opérations sur les vecteurs s'écrivent très simplement en coordonnées rectangulaires :
- Addition et multiplication par scalaire :
(Cela est vrai pour n'importe quelle dimension n et même, à égalité avec les rectangulaires, pour les coordonnées obliques).
une ⋅ b = une 1 b 1 + une 2 b 2 + une 3 b 3 + ⋯ + une n b n (\displaystyle \mathbf (a) \cdot \mathbf (b) =a_(1)b_(1)+a_(2 )b_(2)+a_(3)b_(3)+\points +a_(n)b_(n)) une ⋅ b = ∑ je = 1 n une je b je , (\displaystyle \mathbf (a) \cdot \mathbf (b) =\sum \limits _(i=1)^(n)a_(i)b_(i),)(Uniquement en coordonnées rectangulaires avec échelle unitaire sur tous les axes).
- En utilisant le produit scalaire, vous pouvez calculer la longueur du vecteur
- Et k (\ displaystyle \ mathbf (k) )
e x (\displaystyle \mathbf (e)_(x)), e y (\displaystyle \mathbf (e)_(y)) Et e z (\displaystyle \mathbf (e)_(z)).
Symboles fléchés ( je → (\displaystyle (\vec (i))), j → (\displaystyle (\vec (j))) Et k → (\displaystyle (\vec (k))) ou e → x (\displaystyle (\vec (e))_(x)), e → y (\displaystyle (\vec (e))_(y)) Et e → z (\displaystyle (\vec (e))_(z))) ou autres conformément à la manière habituelle de désigner les vecteurs dans l'une ou l'autre littérature.
Dans ce cas, dans le cas d'un système de coordonnées droit, les formules suivantes avec produits vectoriels de vecteurs unitaires sont valables :
Pour les dimensions supérieures à 3 (ou pour le cas général où la dimension peut être quelconque), généralement pour les vecteurs unitaires, nous utilisons plutôt une notation avec des indices numériques, bien souvent c'est
e 1 , e 2 , e 3 , … e n , (\displaystyle \mathbf (e) _(1),\mathbf (e) _(2),\mathbf (e) _(3),\dots \mathbf ( e) _(n),)Où n- dimension de l'espace.
Un vecteur de n'importe quelle dimension est développé en fonction de sa base (les coordonnées servent de coefficients d'expansion) :
une = une 1 e 1 + une 2 e 2 + une 3 e 3 + ⋯ + une n e n (\displaystyle \mathbf (a) =a_(1)\mathbf (e) _(1)+a_(2)\mathbf ( e) _(2)+a_(3)\mathbf (e) _(3)+\dots +a_(n)\mathbf (e) _(n)) une = ∑ je = 1 n une je e je , (\displaystyle \mathbf (a) =\sum \limits _(i=1)^(n)a_(i)\mathbf (e) _(i),) Pierre Fermat, cependant, ses œuvres ont été publiées pour la première fois après sa mort. Descartes et Fermat ont utilisé la méthode des coordonnées uniquement sur le plan.La méthode des coordonnées pour l'espace tridimensionnel a été utilisée pour la première fois par Leonhard Euler au XVIIIe siècle. L'utilisation des orts remonte apparemment à
Si vous êtes à un point zéro et que vous vous demandez de combien d'unités de distance vous avez besoin pour aller tout droit puis tout droit vers la droite pour arriver à un autre point, alors vous utilisez déjà un système de coordonnées cartésiennes rectangulaires sur l'avion. Et si le point est situé au-dessus du plan sur lequel vous vous trouvez, et que vous ajoutez à vos calculs une montée au point le long des escaliers strictement vers le haut également d'un certain nombre d'unités de distance, alors vous utilisez déjà un système de coordonnées cartésiennes rectangulaires dans espace.
Un système ordonné de deux ou trois axes sécants perpendiculaires les uns aux autres avec une origine commune (origine des coordonnées) et une unité de longueur commune est appelé système de coordonnées cartésiennes rectangulaires .
Le nom du mathématicien français René Descartes (1596-1662) est principalement associé à un système de coordonnées dans lequel une unité de longueur commune est mesurée sur tous les axes et les axes sont droits. En plus du rectangulaire, il y a système de coordonnées cartésiennes général (système de coordonnées affines). Il peut également comprendre des axes qui ne sont pas nécessairement perpendiculaires. Si les axes sont perpendiculaires, alors le système de coordonnées est rectangulaire.
Système de coordonnées cartésiennes rectangulaires sur un plan a deux axes et système de coordonnées cartésiennes rectangulaires dans l'espace - trois axes. Chaque point sur un plan ou dans l'espace est défini par un ensemble ordonné de coordonnées - des nombres correspondant à l'unité de longueur du système de coordonnées.
A noter que, comme il ressort de la définition, il existe un système de coordonnées cartésiennes sur une ligne droite, c'est-à-dire à une dimension. L'introduction de coordonnées cartésiennes sur une ligne est l'une des façons par lesquelles tout point d'une ligne est associé à un nombre réel bien défini, c'est-à-dire une coordonnée.
La méthode des coordonnées, née dans les travaux de René Descartes, a marqué une restructuration révolutionnaire de toutes les mathématiques. Il est devenu possible d'interpréter des équations algébriques (ou inégalités) sous forme d'images géométriques (graphiques) et, à l'inverse, de rechercher des solutions à des problèmes géométriques à l'aide de formules analytiques et de systèmes d'équations. Oui, les inégalités z < 3 геометрически означает полупространство, лежащее ниже плоскости, параллельной координатной плоскости xOy et situé au-dessus de ce plan de 3 unités.
En utilisant le système de coordonnées cartésiennes, l'appartenance d'un point sur une courbe donnée correspond au fait que les nombres X Et oui satisfaire une équation. Ainsi, les coordonnées d'un point sur un cercle de centre en un point donné ( un; b) satisfont l'équation (X - un)² + ( oui - b)² = R.² .
Système de coordonnées cartésiennes rectangulaires sur un plan
Deux axes perpendiculaires sur un plan avec une origine commune et la même forme d'unité d'échelle Système de coordonnées rectangulaires cartésiennes sur le plan . L'un de ces axes est appelé l'axe Bœuf, ou axe x , l'autre - l'axe Oy, ou axe y . Ces axes sont également appelés axes de coordonnées. Notons par MX Et Moui respectivement, la projection d'un point arbitraire M sur l'axe Bœuf Et Oy. Comment obtenir des projections ? Passons en revue le point M Bœuf. Cette droite coupe l'axe Bœufà ce point MX. Passons en revue le point M droite perpendiculaire à l'axe Oy. Cette droite coupe l'axe Oyà ce point Moui. Ceci est montré dans l’image ci-dessous.
X Et oui points M nous appellerons les valeurs des segments dirigés en conséquence OMX Et OMoui. Les valeurs de ces segments orientés sont calculées en conséquence comme X = X0 - 0 Et oui = oui0 - 0 . Coordonnées cartésiennes X Et oui points M abscisse Et ordonnée . Le fait que le point M a des coordonnées X Et oui, est noté comme suit : M(X, oui) .
Les axes de coordonnées divisent le plan en quatre quadrant , dont la numérotation est indiquée dans la figure ci-dessous. Il montre également la disposition des signes pour les coordonnées des points en fonction de leur emplacement dans un quadrant particulier.
En plus des coordonnées rectangulaires cartésiennes sur un plan, le système de coordonnées polaires est également souvent pris en compte. A propos de la méthode de transition d'un système de coordonnées à un autre - dans la leçon système de coordonnées polaires .

Système de coordonnées cartésiennes rectangulaires dans l'espace
Les coordonnées cartésiennes dans l'espace sont introduites en complète analogie avec les coordonnées cartésiennes dans le plan.
Trois axes mutuellement perpendiculaires dans l'espace (axes de coordonnées) avec une origine commune Ô et avec la même unité d'échelle, ils forment Système de coordonnées rectangulaires cartésiennes dans l'espace .
L'un de ces axes est appelé axe Bœuf, ou axe x , l'autre - l'axe Oy, ou axe y , le troisième axe Oz, ou application de l'axe . Laisser MX, Moui Mz- projections d'un point arbitraire M espace sur l'axe Bœuf , Oy Et Oz respectivement.
Passons en revue le point M BœufBœufà ce point MX. Passons en revue le point M plan perpendiculaire à l'axe Oy. Ce plan coupe l'axe Oyà ce point Moui. Passons en revue le point M plan perpendiculaire à l'axe Oz. Ce plan coupe l'axe Ozà ce point Mz.

Coordonnées rectangulaires cartésiennes X , oui Et z points M nous appellerons les valeurs des segments dirigés en conséquence OMX, OMoui Et OMz. Les valeurs de ces segments orientés sont calculées en conséquence comme X = X0 - 0 , oui = oui0 - 0 Et z = z0 - 0 .
Coordonnées cartésiennes X , oui Et z points M sont appelés en conséquence abscisse , ordonnée Et postuler .
Les axes de coordonnées pris par paires sont situés dans des plans de coordonnées xOy , yOz Et zox .
Problèmes concernant les points dans un système de coordonnées cartésiennes
Exemple 1.
UN(2; -3) ;
B(3; -1) ;
C(-5; 1) .
Trouvez les coordonnées des projections de ces points sur l'axe des abscisses.
Solution. Comme il ressort de la partie théorique de cette leçon, la projection d'un point sur l'axe des abscisses se situe sur l'axe des abscisses lui-même, c'est-à-dire l'axe Bœuf, et a donc une abscisse égale à l'abscisse du point lui-même, et une ordonnée (coordonnée sur l'axe Oy, que l'axe des x coupe au point 0), qui est égal à zéro. On obtient donc les coordonnées suivantes de ces points sur l'axe des x :
UNx(2;0);
Bx(3;0);
Cx (-5 ; 0).
Exemple 2. Dans le système de coordonnées cartésiennes, les points sont donnés sur le plan
UN(-3; 2) ;
B(-5; 1) ;
C(3; -2) .
Trouvez les coordonnées des projections de ces points sur l'axe des ordonnées.
Solution. Comme il ressort de la partie théorique de cette leçon, la projection d'un point sur l'axe des ordonnées se situe sur l'axe des ordonnées lui-même, c'est-à-dire l'axe Oy, et a donc une ordonnée égale à l'ordonnée du point lui-même, et une abscisse (coordonnée sur l'axe Bœuf, que l'axe des ordonnées coupe au point 0), qui est égal à zéro. On obtient donc les coordonnées suivantes de ces points sur l'axe des ordonnées :
UNy(0;2);
By(0;1);
Cy(0;-2).
Exemple 3. Dans le système de coordonnées cartésiennes, les points sont donnés sur le plan
UN(2; 3) ;
B(-3; 2) ;
C(-1; -1) .
Bœuf .
Bœuf Bœuf Bœuf, aura la même abscisse que le point donné, et une ordonnée égale en valeur absolue à l'ordonnée du point donné, et opposée en signe. On obtient donc les coordonnées suivantes des points symétriques à ces points par rapport à l'axe Bœuf :
UN"(2; -3) ;
B"(-3; -2) ;
C"(-1; 1) .
Exemple 4. Déterminer dans quels quadrants (quarts, dessin avec quadrants - à la fin du paragraphe « Système de coordonnées cartésiennes rectangulaires sur un plan ») un point peut être localisé M(X; oui) , Si
1) xy > 0 ;
2) xy < 0 ;
3) X − oui = 0 ;
4) X + oui = 0 ;
5) X + oui > 0 ;
6) X + oui < 0 ;
7) X − oui > 0 ;
8) X − oui < 0 .
Exemple 5. Dans le système de coordonnées cartésiennes, les points sont donnés sur le plan
UN(-2; 5) ;
B(3; -5) ;
C(un; b) .
Trouver les coordonnées des points symétriques à ces points par rapport à l'axe Oy .
Continuons à résoudre les problèmes ensemble
Exemple 6. Dans le système de coordonnées cartésiennes, les points sont donnés sur le plan
UN(-1; 2) ;
B(3; -1) ;
C(-2; -2) .
Trouver les coordonnées des points symétriques à ces points par rapport à l'axe Oy .
Solution. Rotation de 180 degrés autour de l'axe Oy segment directionnel à partir de l'axe Oy jusqu'à ce point. Sur la figure, où sont indiqués les quadrants du plan, on voit que le point symétrique à celui donné par rapport à l'axe Oy, aura la même ordonnée que le point donné, et une abscisse égale en valeur absolue à l'abscisse du point donné et opposée en signe. On obtient donc les coordonnées suivantes des points symétriques à ces points par rapport à l'axe Oy :
UN"(1; 2) ;
B"(-3; -1) ;
C"(2; -2) .
Exemple 7. Dans le système de coordonnées cartésiennes, les points sont donnés sur le plan
UN(3; 3) ;
B(2; -4) ;
C(-2; 1) .
Trouvez les coordonnées des points symétriques à ces points par rapport à l'origine.
Solution. Nous faisons pivoter le segment dirigé allant de l'origine au point donné de 180 degrés autour de l'origine. Sur la figure, où sont indiqués les quadrants du plan, on voit qu'un point symétrique au point donné par rapport à l'origine des coordonnées aura une abscisse et une ordonnée égales en valeur absolue à l'abscisse et à l'ordonnée du point donné, mais signe opposé. On obtient donc les coordonnées suivantes des points symétriques à ces points par rapport à l'origine :
UN"(-3; -3) ;
B"(-2; 4) ;
C(2; -1) .
Exemple 8.
UN(4; 3; 5) ;
B(-3; 2; 1) ;
C(2; -3; 0) .
Trouvez les coordonnées des projections de ces points :
1) dans un avion Oxy ;
2) dans un avion Oxz ;
3) dans un avion Oyz ;
4) sur l'axe des abscisses ;
5) sur l'axe des ordonnées ;
6) sur l'axe d'application.
1) Projection d'un point sur un plan Oxy est situé sur ce plan lui-même, et a donc une abscisse et une ordonnée égales à l'abscisse et à l'ordonnée d'un point donné, et une applicative égale à zéro. On obtient donc les coordonnées suivantes des projections de ces points sur Oxy :
UNxy (4 ; 3 ; 0);
Bxy (-3 ; 2 ; 0);
Cxy(2;-3;0).
2) Projection d'un point sur un plan Oxz est situé sur ce plan lui-même, et a donc une abscisse et une applicative égales à l'abscisse et une applicative d'un point donné, et une ordonnée égale à zéro. On obtient donc les coordonnées suivantes des projections de ces points sur Oxz :
UNxz (4 ; 0 ; 5);
Bxz (-3 ; 0 ; 1);
Cxz (2 ; 0 ; 0).
3) Projection d'un point sur un plan Oyz est situé sur ce plan lui-même, et a donc une ordonnée et une applicative égales à l'ordonnée et une applicative d'un point donné, et une abscisse égale à zéro. On obtient donc les coordonnées suivantes des projections de ces points sur Oyz :
UNyz(0 ; 3 ; 5);
Byz (0 ; 2 ; 1);
Cyz (0 ; -3 ; 0).
4) Comme il ressort de la partie théorique de cette leçon, la projection d'un point sur l'axe des abscisses se situe sur l'axe des abscisses lui-même, c'est-à-dire l'axe Bœuf, et a donc une abscisse égale à l'abscisse du point lui-même, et l'ordonnée et l'appliqué de la projection sont égaux à zéro (puisque les axes ordonnée et appliqué coupent l'abscisse au point 0). On obtient les coordonnées suivantes des projections de ces points sur l'axe des abscisses :
UNx(4;0;0);
Bx (-3 ; 0 ; 0);
Cx(2;0;0).
5) La projection d'un point sur l'axe des ordonnées est située sur l'axe des ordonnées lui-même, c'est-à-dire l'axe Oy, et a donc une ordonnée égale à l'ordonnée du point lui-même, et l'abscisse et l'appliqué de la projection sont égaux à zéro (puisque les axes abscisse et appliqué coupent l'axe des ordonnées au point 0). On obtient les coordonnées suivantes des projections de ces points sur l'axe des ordonnées :
UNy(0 ; 3 ; 0);
Boui (0 ; 2 ; 0);
Cy(0;-3;0).
6) La projection d'un point sur l'axe applicatif est située sur l'axe applicatif lui-même, c'est-à-dire l'axe Oz, et a donc un applicatif égal à l'appliqué du point lui-même, et l'abscisse et l'ordonnée de la projection sont égales à zéro (puisque les axes des abscisses et des ordonnées coupent l'axe applicatif au point 0). On obtient les coordonnées suivantes des projections de ces points sur l'axe appliqué :
UNz (0 ; 0 ; 5);
Bz (0 ; 0 ; 1);
Cz(0 ; 0 ; 0).
Exemple 9. Dans le système de coordonnées cartésiennes, les points sont donnés dans l'espace
UN(2; 3; 1) ;
B(5; -3; 2) ;
C(-3; 2; -1) .
Trouver les coordonnées des points symétriques à ces points par rapport à :
1) avion Oxy ;
2) avions Oxz ;
3) avions Oyz ;
4) axes des abscisses ;
5) axes des ordonnées ;
6) appliquer les axes ;
7) origine des coordonnées.
1) "Déplacer" le point de l'autre côté de l'axe Oxy Oxy, aura une abscisse et une ordonnée égales à l'abscisse et à l'ordonnée d'un point donné, et une applicative égale en grandeur à l'aplicate d'un point donné, mais de signe opposé. Ainsi, nous obtenons les coordonnées suivantes des points symétriques aux données relatives au plan Oxy :
UN"(2; 3; -1) ;
B"(5; -3; -2) ;
C"(-3; 2; 1) .
2) "Déplacer" le point de l'autre côté de l'axe Oxzà la même distance. A partir de la figure affichant l'espace de coordonnées, on voit qu'un point symétrique à un point donné par rapport à l'axe Oxz, aura une abscisse et une applicative égales à l'abscisse et une applicative d'un point donné, et une ordonnée égale en grandeur à l'ordonnée d'un point donné, mais de signe opposé. Ainsi, nous obtenons les coordonnées suivantes des points symétriques aux données relatives au plan Oxz :
UN"(2; -3; 1) ;
B"(5; 3; 2) ;
C"(-3; -2; -1) .
3) "Déplacer" le point de l'autre côté de l'axe Oyzà la même distance. A partir de la figure affichant l'espace de coordonnées, on voit qu'un point symétrique à un point donné par rapport à l'axe Oyz, aura une ordonnée et une aplicate égales à l'ordonnée et une aplicate d'un point donné, et une abscisse égale en valeur à l'abscisse d'un point donné, mais de signe opposé. Ainsi, nous obtenons les coordonnées suivantes des points symétriques aux données relatives au plan Oyz :
UN"(-2; 3; 1) ;
B"(-5; -3; 2) ;
C"(3; 2; -1) .
Par analogie avec les points symétriques sur un plan et les points dans l'espace symétriques aux données relatives aux plans, on note que dans le cas de symétrie par rapport à un axe du système de coordonnées cartésiennes dans l'espace, la coordonnée sur l'axe par rapport à auquel la symétrie est donnée conservera son signe, et les coordonnées sur les deux autres axes seront les mêmes en valeur absolue que les coordonnées d'un point donné, mais opposées en signe.
4) L'abscisse conservera son signe, mais l'ordonnée et l'appliquée changeront de signe. Ainsi, on obtient les coordonnées suivantes des points symétriques aux données par rapport à l'axe des abscisses :
UN"(2; -3; -1) ;
B"(5; 3; -2) ;
C"(-3; -2; 1) .
5) L'ordonnée conservera son signe, mais l'abscisse et l'appliqué changeront de signe. Ainsi, on obtient les coordonnées suivantes des points symétriques aux données par rapport à l'axe des ordonnées :
UN"(-2; 3; -1) ;
B"(-5; -3; -2) ;
C"(3; 2; 1) .
6) L'appliqué conservera son signe, mais l'abscisse et l'ordonnée changeront de signe. Ainsi, nous obtenons les coordonnées suivantes des points symétriques aux données par rapport à l'axe appliqué :
UN"(-2; -3; 1) ;
B"(-5; 3; 2) ;
C"(3; -2; -1) .
7) Par analogie avec la symétrie dans le cas de points sur un plan, dans le cas de symétrie par rapport à l'origine des coordonnées, toutes les coordonnées d'un point symétrique à un point donné seront égales en valeur absolue aux coordonnées d'un point donné, mais en face d'eux en signe. Ainsi, nous obtenons les coordonnées suivantes des points symétriques aux données relatives à l'origine.
Coordonnées - ce sont des grandeurs qui déterminent la position de n'importe quel point de la surface ou dans l'espace dans le système de coordonnées adopté. Le système de coordonnées établit les points, lignes ou plans initiaux (d'origine) pour compter les quantités nécessaires - l'origine des coordonnées et leurs unités. En topographie et en géodésie, les systèmes de coordonnées géographiques, rectangulaires, polaires et bipolaires sont les plus largement utilisés.
Les coordonnées géographiques (Fig. 2.8) sont utilisées pour déterminer la position des points à la surface de la Terre sur un ellipsoïde (sphère). Dans ce système de coordonnées, le plan initial est le méridien d'origine et le plan équatorial. Un méridien est une ligne de coupe d'un ellipsoïde par un plan passant par un point donné et l'axe de rotation de la Terre.Une parallèle est une ligne de coupe d’un ellipsoïde par un plan passant par un point donné et perpendiculaire à l’axe de la Terre. Un parallèle dont le plan passe par le centre de l’ellipsoïde est appelé équateur. Par chaque point situé à la surface du globe, un seul méridien et un seul parallèle peuvent être tracés.
Coordonnées géographiques sont des grandeurs angulaires : longitude l et latitude j.
La longitude géographique l est l'angle dièdre entre le plan d'un méridien donné (passant par le point B) et le plan du méridien d'origine. Le méridien d'origine est considéré comme le méridien passant par le centre du hall principal de l'Observatoire de Greenwich dans la ville de Londres. Pour le point B, la longitude est déterminée par l'angle l = WCD. Les longitudes sont comptées à partir du premier méridien dans les deux directions – est et ouest. A cet égard, on distingue les longitudes ouest et est, qui varient de 0° à 180°.
Latitude géographique j est l'angle formé par le plan équatorial et le fil à plomb passant par un point donné. Si la Terre est prise comme une sphère, alors pour le point B (Fig. 2.8) la latitude j est déterminée par l'angle DCB. Les latitudes mesurées depuis l'équateur vers le nord sont dites nord, et vers le sud - sud, elles varient de 0° à l'équateur à 90° aux pôles.
Les coordonnées géographiques peuvent être obtenues à partir d'observations astronomiques ou de mesures géodésiques. Dans le premier cas, ils sont appelés astronomiques et dans le second, géodésiques (L - longitude, B - latitude). Lors des observations astronomiques, la projection des points sur la surface de référence est réalisée par des fils à plomb, et lors des mesures géodésiques - par des normales. Par conséquent, les valeurs des coordonnées astronomiques et géodésiques diffèrent selon le degré de déviation du fil à plomb.
L'utilisation d'ellipsoïdes de référence différents par différents états entraîne des différences dans les coordonnées des mêmes points calculées par rapport à différentes surfaces de référence. En pratique, cela se traduit par le déplacement général de l'image cartographique par rapport aux méridiens et parallèles sur les cartes à grande et moyenne échelle.
Coordonnées rectangulaires sont appelées quantités linéaires - abscisse et ordonnée, qui déterminent la position d'un point sur le plan par rapport aux directions d'origine.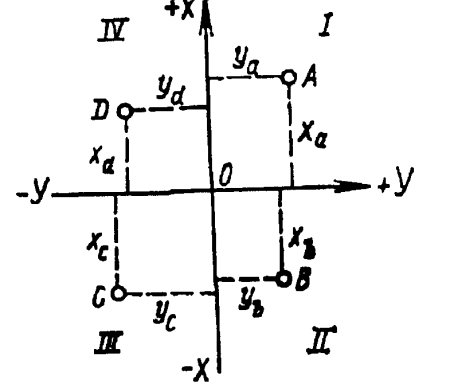
(Fig.2.9)
En géodésie et en topographie, le système droitier de coordonnées rectangulaires est adopté. Cela le distingue du système de coordonnées gaucher utilisé en mathématiques. Les directions initiales sont deux lignes perpendiculaires entre elles dont le point de départ est leur point d’intersection O.
La droite XX (axe des abscisses) est alignée avec la direction du méridien passant par l'origine des coordonnées, ou avec une direction parallèle à un certain méridien. La droite YY (axe des ordonnées) passe par le point O perpendiculaire à l'axe des abscisses. Dans un tel système, la position d'un point sur le plan est déterminée par la distance la plus courte par rapport aux axes de coordonnées. La position du point A est déterminée par la longueur des perpendiculaires Xa et Ya. Le segment Xa est appelé l'abscisse du point A, et Ya est l'ordonnée de ce point. Les coordonnées rectangulaires sont généralement exprimées en mètres. La zone de terrain au point O est divisée en quatre quarts par les axes des abscisses et des ordonnées (Fig. 2.9). Le nom des quartiers est déterminé par les désignations acceptées des points cardinaux. Les quartiers sont numérotés dans le sens des aiguilles d'une montre : I - NE ; II-SE ; III - SW ; IV - NO.
Dans le tableau 2.3 montre les abscisses X et les ordonnées Y des points situés dans différents quartiers et donne leurs noms.
Tableau 2.3
Les abscisses des points situés vers le haut de l'origine des coordonnées sont considérées comme positives, et vers le bas de celle-ci - négatives, les ordonnées des points situés à droite - positives, à gauche - négatives. Le système de coordonnées rectangulaires plates est utilisé sur des zones limitées de la surface terrestre qui peuvent être confondues avec des coordonnées plates.
Les coordonnées dont l'origine est un point au sol sont appelées polaires. Dans ce système de coordonnées, les angles d'orientation sont mesurés. Sur un plan horizontal (Fig. 2.10), passant par un point O arbitrairement choisi, appelé pôle, tracez une droite OX - l'axe polaire.
Ensuite, la position de n'importe quel point, par exemple M, sera déterminée par le rayon - vecteur r1 et l'angle de direction a1, ainsi que par le point N - r2 et a2, respectivement. Les angles a1 et a2 sont mesurés depuis l'axe polaire dans le sens des aiguilles d'une montre jusqu'au rayon vecteur. L'axe polaire peut être localisé arbitrairement ou aligné avec la direction de tout méridien passant par le pôle O.
Le système de coordonnées bipolaire (Fig. 2.11) représente deux pôles fixes sélectionnés O1 et O2, reliés par une ligne droite - l'axe polaire. Ce système de coordonnées permet de déterminer la position du point M par rapport à l'axe polaire sur le plan en utilisant deux angles b1 et b2, deux rayons vecteurs r1 et r2, ou des combinaisons de ceux-ci. Si les coordonnées rectangulaires des points O1 et O2 sont connues, alors la position du point M peut être calculée analytiquement.
Riz. 2.11
Riz. 2.12
Hauteurs des points à la surface de la Terre. Pour déterminer la position des points sur la surface physique de la Terre, il ne suffit pas de connaître uniquement les coordonnées horizontales X, Y ou l, j, il faut une troisième coordonnée - la hauteur du point H. La hauteur du point H ( Fig. 2.12) est la distance dans la direction verticale d'un point donné (A´; B´ ´) à la surface du niveau principal accepté MN. La valeur numérique de la hauteur d’un point s’appelle l’élévation. Les hauteurs mesurées à partir de la surface plane principale MN sont appelées hauteurs absolues (AA'; BB''), et celles déterminées par rapport à une surface plane arbitrairement sélectionnée sont appelées hauteurs conditionnelles (В'В''). La différence de hauteur de deux points ou la distance dans la direction verticale entre des surfaces planes passant par deux points quelconques de la Terre est appelée hauteur relative (В´В´´) ou élévation de ces points h.
La République de Biélorussie a adopté le système baltique de 1977. Les hauteurs sont calculées à partir du niveau de la surface qui coïncide avec le niveau moyen de l'eau dans le golfe de Finlande, à partir du zéro de la jauge d'eau de Cronstadt.En voici un autre
Chapitre I. Examen analytique des systèmes de coordonnées existants
informations généralesà propos des systèmes de coordonnées
Un système de coordonnées est un ensemble de définitions qui implémentent la méthode des coordonnées, c'est-à-dire un moyen de déterminer la position d'un point ou d'un corps à l'aide de nombres ou d'autres symboles. L'ensemble des nombres qui déterminent la position d'un point spécifique est appelé les coordonnées de ce point. En général, le système de coordonnées peut être défini comme système de référence pour déterminer la position de points dans l'espace ou sur des plans et des surfaces par rapport à des axes, des plans ou des surfaces sélectionnés.
Le système de coordonnées est largement utilisé dans de nombreuses branches scientifiques.
En mathématiques, les coordonnées sont un ensemble de nombres associés à des points divers sur une certaine carte d'un certain atlas.
En géométrie élémentaire, les coordonnées sont des quantités qui déterminent la position d'un point sur un plan et dans l'espace. Sur un plan, la position d'un point est le plus souvent déterminée par les distances de deux lignes droites (axes de coordonnées) se coupant en un point (l'origine) à angle droit ; l'une des coordonnées s'appelle l'ordonnée et l'autre s'appelle l'abscisse. Dans l'espace selon le système cartésien, la position d'un point est déterminée par les distances à trois plans de coordonnées se coupant en un point à angle droit les uns par rapport aux autres, ou par des coordonnées sphériques, où l'origine des coordonnées est au centre de la sphère. .
En géographie, les coordonnées sont choisies comme un système de coordonnées (approximativement) sphérique - latitude, longitude et hauteur au-dessus d'un niveau général connu (par exemple, l'océan).
En astronomie, les coordonnées célestes sont une paire ordonnée de grandeurs angulaires (par exemple, l'ascension droite et la déclinaison), à l'aide desquelles la position des luminaires et des points auxiliaires sur la sphère céleste est déterminée. En astronomie, divers systèmes de coordonnées célestes sont utilisés. Chacun d’eux est essentiellement un système de coordonnées sphériques (sans coordonnée radiale) avec un plan fondamental et une origine correctement choisis. Selon le choix du plan fondamental, le système de coordonnées céleste est dit horizontal (plan de l'horizon), équatorial (plan équatorial), écliptique (plan de l'écliptique) ou galactique.
(avion galactique).
Le système de coordonnées le plus utilisé est le système de coordonnées rectangulaires (également appelé système de coordonnées cartésiennes).
Les coordonnées planes et spatiales peuvent être saisies d’une infinité de manières différentes. Résoudre ceci ou cela mathématique ou problème physique en utilisant la méthode des coordonnées, vous pouvez utiliser différents systèmes de coordonnées, en choisissant celui dans lequel le problème est résolu plus facilement ou plus facilement dans ce cas particulier. Une généralisation bien connue des systèmes de coordonnées sont les systèmes de référence et les systèmes de référence.
Classification des systèmes de coordonnées
Comme nous l'avons déjà découvert, il existe de nombreux systèmes de coordonnées, ils doivent donc être classés d'une manière ou d'une autre.
Les systèmes de coordonnées peuvent être classés par :
1. système de coordonnées rectangulaires (plats) : XY (Fig. 1)
Dans ce cas, le plan de l'équateur terrestre est pris comme plan XOY principal. L'axe de coordonnées principal OX est dirigé vers un certain point. L'axe OY est situé dans le plan de l'équateur terrestre à un angle de 90º à l'est du premier méridien accepté. L'axe OZ est aligné avec la direction nord de l'axe de rotation de la Terre.
SC rectangulaire (Fig. 1)
2. Système de coordonnées spatiales rectangulaires : XYZ (Fig. 2)
L'origine des coordonnées spatiales rectangulaires est soit déterminée sous condition de coïncidence avec le centre de masse de la Terre (dans les systèmes terrestres généraux), soit située à proximité de celui-ci.
L'orientation de l'axe Z dans chaque système de coordonnées est réalisée en tenant compte de l'orientation de l'axe de rotation moyen de la Terre. Lors de l'établissement du système du pôle moyen, y compris le pôle dans le système EOR, les conditions de passage de l'axe de rotation moyen à travers le centre de masse de la Terre ne sont donc pas imposées à la fois dans les systèmes terrestres de référence et général. , les axes Z ne coïncident pas avec l'axe moyen de rotation, mais lui sont parallèles.
Le plan XOY est perpendiculaire à l'axe Z et à l'axe moyen de rotation de la Terre. Le plan XOZ est choisi à la condition qu'il soit parallèle au plan du méridien astronomique principal.

SC spatial rectangulaire (Fig. 2)
3. Système de coordonnées géodésiques (ellipsoïdales) : BLH (Fig. 3)
B – latitude géodésique, l’angle entre la normale à l’ellipsoïde passant par un point M donné de la surface de la Terre et le plan équatorial ;
L – longitude géodésique, angle dièdre entre les plans de Greenwich G et un méridien géodésique donné ;
H – hauteur géodésique au-dessus de l'ellipsoïde de référence, la distance normale entre la surface de l'ellipsoïde et le point M.

SC géodésique (Fig. 3)
· But
1. Général terrestre (mondial) WGS 84, PZ 9011, ITRS
Général terrestre Il est d'usage d'appeler de tels systèmes de coordonnées obtenus sous la condition de combiner leur origine avec le centre de masse de la Terre. Ils sont établis par rapport au territoire couvrant la totalité de l'ellipsoïde terrestre. Et il est utilisé pour résoudre des problèmes généraux. Les plus pratiques sont les coordonnées géographiques (latitude et longitude) mesurées à partir de la surface de l'équateur et du premier méridien sous forme d'arcs, qui correspondent aux angles centraux.
2. État (SK-95, SK-63, GSK-2011)
Ce système de coordonnées est limité au territoire d'un État et est utilisé pour effectuer des travaux géodésiques et cartographiques au sein de cet État. Dans la Fédération de Russie, la surface de l'ellipsoïde de Krasovsky est utilisée comme surface de coordonnées dans ce système.
3. Local (MSK-50, MSK-50.2, Moscou)
Sous système de coordonnées local s'entend comme un système de coordonnées conditionnel établi par rapport à un territoire limité ne dépassant pas le territoire du sujet Fédération Russe, dont l'origine des coordonnées et l'orientation des axes de coordonnées sont décalées par rapport à l'origine des coordonnées et à l'orientation des axes de coordonnées du système de coordonnées d'état unifié utilisé dans les travaux géodésiques et cartographiques. Des systèmes de coordonnées locaux sont établis pour les travaux géodésiques et topographiques lors des levés techniques, de la construction et de l'exploitation de bâtiments et de structures, de l'arpentage, de la maintenance des cadastres et d'autres travaux spéciaux. Une exigence obligatoire lors de l'établissement de systèmes de coordonnées locaux est d'assurer la possibilité de transition du système de coordonnées local à système d'état coordonnées, qui est effectuée à l'aide de paramètres de transition (clés). Chaque système de coordonnées local peut être créé avec une ou plusieurs zones à trois ou six degrés. Les paramètres des systèmes de coordonnées locaux et les clés de transition vers le système de coordonnées d'État (formules et règles par lesquelles les coordonnées des points dans un système peuvent être obtenues dans un autre système) sont établis par Rosreestr en accord avec le ministère de la Défense de la Russie. Fédération.
· Début du décompte :
1. Géocentriques X, Y, Z, avec origine au centre de masse de la Terre ;
2. Référence (quasi-géocentrique) X, Y, Z, avec l'origine proche du centre de masse terrestre, au centre de l'ellipsoïde de référence accepté ;
3. Topocentrique X, Y, Z, avec origine à la surface de la Terre au point d'observation.
Plan de coordonnées principal XOY
Diffèrent dans le choix du plan de coordonnées principal
1. Équatorial - dans le plan équatorial pour une certaine époque ;
Il existe un premier et un deuxième système de coordonnées équatoriales. Le premier est tournant, c'est-à-dire qu'il participe à la rotation quotidienne de la Terre, le second est stationnaire, c'est-à-dire qu'il ne participe pas à la rotation quotidienne de la Terre.
2. Horizontal - dans le plan de l'horizon local ;
3. Orbital - dans le plan orbital.
· La direction d'orientation des axes de coordonnées par rapport aux points du système spatial est divisée en
1. Stellaires, s’ils sont orientés vers des étoiles lointaines
2. Quasar, si les axes sont orientés le long de distances naturelles
sources radio (quasars) ;
3. Terrestre, si les axes sont orientés selon des points fixes de la terre
· Temps auquel se rapportent la position du point d'équinoxe vernal γ et la direction de l'axe z :
1. Moyennes prises pour une certaine époque (par exemple, pour l'ère 2000) ;
2. Vrai, fait référence au véritable point de l'équinoxe de printemps ;
3. Instantané, correspondant à la position de l'axe de rotation au moment de l'observation.
Pour résoudre la plupart des problèmes des sciences appliquées, il est nécessaire de connaître l'emplacement d'un objet ou d'un point, qui est déterminé à l'aide de l'un des systèmes de coordonnées acceptés. De plus, il existe des systèmes de hauteur qui déterminent également l'emplacement d'altitude d'un point sur
Que sont les coordonnées
Les coordonnées sont des valeurs numériques ou alphabétiques qui peuvent être utilisées pour déterminer l'emplacement d'un point au sol. En conséquence, un système de coordonnées est un ensemble de valeurs du même type qui ont le même principe pour trouver un point ou un objet.
Trouver l'emplacement d'un point est nécessaire pour résoudre de nombreux problèmes pratiques. Dans une science telle que la géodésie, déterminer l'emplacement d'un point dans un espace donné est l'objectif principal sur lequel reposent tous les travaux ultérieurs.
La plupart des systèmes de coordonnées définissent généralement l'emplacement d'un point sur un plan limité par seulement deux axes. Afin de déterminer la position d'un point dans l'espace tridimensionnel, un système de hauteur est également utilisé. Avec son aide, vous pouvez connaître l'emplacement exact de l'objet souhaité.
En bref sur les systèmes de coordonnées utilisés en géodésie
Les systèmes de coordonnées déterminent la localisation d'un point sur un territoire en lui attribuant trois valeurs. Les principes de leur calcul sont différents pour chaque système de coordonnées.

Les principaux systèmes de coordonnées spatiales utilisés en géodésie :
- Géodésique.
- Géographique.
- Polaire.
- Rectangulaire.
- Coordonnées zonales Gauss-Kruger.
Tous les systèmes ont leur propre point de départ, leurs valeurs pour l'emplacement de l'objet et leur domaine d'application.
Coordonnées géodésiques
Le principal chiffre utilisé pour mesurer les coordonnées géodésiques est l’ellipsoïde terrestre.
Un ellipsoïde est une figure compressée en trois dimensions qui représente le mieux la forme du globe. Étant donné que le globe est une figure mathématiquement irrégulière, un ellipsoïde est utilisé à la place pour déterminer les coordonnées géodésiques. Cela facilite la réalisation de nombreux calculs pour déterminer la position d'un corps sur la surface.

Les coordonnées géodésiques sont définies par trois valeurs : latitude, longitude et altitude géodésiques.
- La latitude géodésique est un angle dont le début se situe sur le plan de l'équateur et sa fin se situe à la perpendiculaire tracée au point souhaité.
- La longitude géodésique est l'angle mesuré entre le méridien d'origine et le méridien sur lequel se trouve le point souhaité.
- La hauteur géodésique est la valeur de la normale tracée à la surface de l'ellipsoïde de rotation terrestre à partir d'un point donné.
Coordonnées géographiques
Pour résoudre des problèmes de haute précision de géodésie supérieure, il est nécessaire de faire la distinction entre les coordonnées géodésiques et géographiques. Dans le système utilisé en géodésie technique, de telles différences ne sont généralement pas constatées en raison du petit espace couvert par le travail.
Pour déterminer les coordonnées géodésiques, un ellipsoïde est utilisé comme plan de référence et un géoïde est utilisé pour déterminer les coordonnées géographiques. Le géoïde est une figure mathématiquement irrégulière qui se rapproche plus de la forme réelle de la Terre. Sa surface nivelée est considérée comme celle qui continue sous le niveau de la mer dans son état calme.

Le système de coordonnées géographiques utilisé en géodésie décrit la position d'un point dans l'espace avec trois valeurs. la longitude coïncide avec la géodésique, puisque le point de référence s'appellera aussi Greenwich. Il passe par l'observatoire du même nom à Londres. déterminé à partir de l'équateur tracé sur la surface du géoïde.
La hauteur dans le système de coordonnées local utilisé en géodésie est mesurée à partir du niveau de la mer dans son état calme. Sur le territoire de la Russie et des pays de l'ex-Union, la marque à partir de laquelle les hauteurs sont déterminées est le poteau de Kronstadt. Elle est située au niveau de la mer Baltique.
Coordonnées polaires
Le système de coordonnées polaires utilisé en géodésie présente d'autres nuances dans la prise de mesures. Il est utilisé sur de petites zones de terrain pour déterminer l'emplacement relatif d'un point. L'origine peut être n'importe quel objet marqué comme initial. Ainsi, en utilisant les coordonnées polaires, il est impossible de déterminer l'emplacement sans ambiguïté d'un point sur le territoire du globe.

Les coordonnées polaires sont déterminées par deux quantités : l'angle et la distance. L'angle est mesuré depuis la direction nord du méridien jusqu'à un point donné, déterminant sa position dans l'espace. Mais un seul angle ne suffira pas, c'est pourquoi un rayon vecteur est introduit - la distance entre le point debout et l'objet souhaité. À l'aide de ces deux paramètres, vous pouvez déterminer l'emplacement du point dans le système local.
En règle générale, ce système de coordonnées est utilisé pour effectuer des travaux d'ingénierie effectués sur une petite zone de terrain.
Coordonnées rectangulaires
Le système de coordonnées rectangulaires utilisé en géodésie est également utilisé dans de petites zones de terrain. L'élément principal du système est l'axe de coordonnées à partir duquel le comptage s'effectue. Les coordonnées d'un point sont trouvées comme la longueur des perpendiculaires tirées des axes des abscisses et des ordonnées jusqu'au point souhaité.

La direction nord de l'axe X et la direction est de l'axe Y sont considérées comme positives, et les directions sud et ouest sont considérées comme négatives. En fonction des signes et des quartiers, la localisation d'un point dans l'espace est déterminée.
Coordonnées de Gauss-Kruger
Le système zonal de coordonnées Gauss-Kruger est similaire au système rectangulaire. La différence est qu’elle peut être appliquée à l’ensemble du globe, et pas seulement à de petites zones.
Les coordonnées rectangulaires des zones de Gauss-Kruger sont essentiellement une projection du globe sur un plan. Il est né à des fins pratiques de représenter de vastes zones de la Terre sur papier. Les distorsions survenant lors du transfert sont considérées comme insignifiantes.
Selon ce système, le globe est divisé par longitude en zones de six degrés avec un méridien axial au milieu. L'équateur est au centre le long d'une ligne horizontale. En conséquence, il existe 60 zones de ce type.

Chacune des soixante zones possède son propre système de coordonnées rectangulaires, mesurées le long de l'axe des ordonnées à partir de X, et le long de l'axe des abscisses à partir de la section de l'équateur terrestre Y. Pour déterminer sans ambiguïté l'emplacement sur le territoire du globe entier, la zone Le nombre est placé devant les valeurs X et Y.
En règle générale, les valeurs de l'axe X sur le territoire de la Russie sont positives, tandis que les valeurs Y peuvent être négatives. Afin d'éviter un signe moins dans les valeurs de l'axe des x, le méridien axial de chaque zone est conditionnellement déplacé de 500 mètres vers l'ouest. Alors toutes les coordonnées deviennent positives.
Le système de coordonnées a été proposé comme possibilité par Gauss et calculé mathématiquement par Kruger au milieu du XXe siècle. Depuis lors, il a été utilisé en géodésie comme l'un des principaux.
Système de hauteur
Les systèmes de coordonnées et d'élévation utilisés en géodésie sont utilisés pour déterminer avec précision la position d'un point sur la Terre. Les hauteurs absolues sont mesurées à partir du niveau de la mer ou d'une autre surface prise comme source. De plus, il existe des hauteurs relatives. Ces derniers sont comptés comme l'excédent du point souhaité à un autre. Ils sont pratiques à utiliser pour travailler dans un système de coordonnées local afin de simplifier le traitement ultérieur des résultats.
Application des systèmes de coordonnées en géodésie
En plus de ce qui précède, il existe d’autres systèmes de coordonnées utilisés en géodésie. Chacun d'eux a ses propres avantages et inconvénients. Il existe également des domaines de travail pour lesquels l'une ou l'autre méthode de détermination de l'emplacement est pertinente.
C'est le but du travail qui détermine quels systèmes de coordonnées utilisés en géodésie sont les mieux utilisés. Pour travailler sur de petites zones, il est pratique d'utiliser des systèmes de coordonnées rectangulaires et polaires, mais pour résoudre des problèmes à grande échelle, il faut des systèmes permettant de couvrir l'ensemble du territoire de la surface terrestre.



